
eVTOL飞行器构型
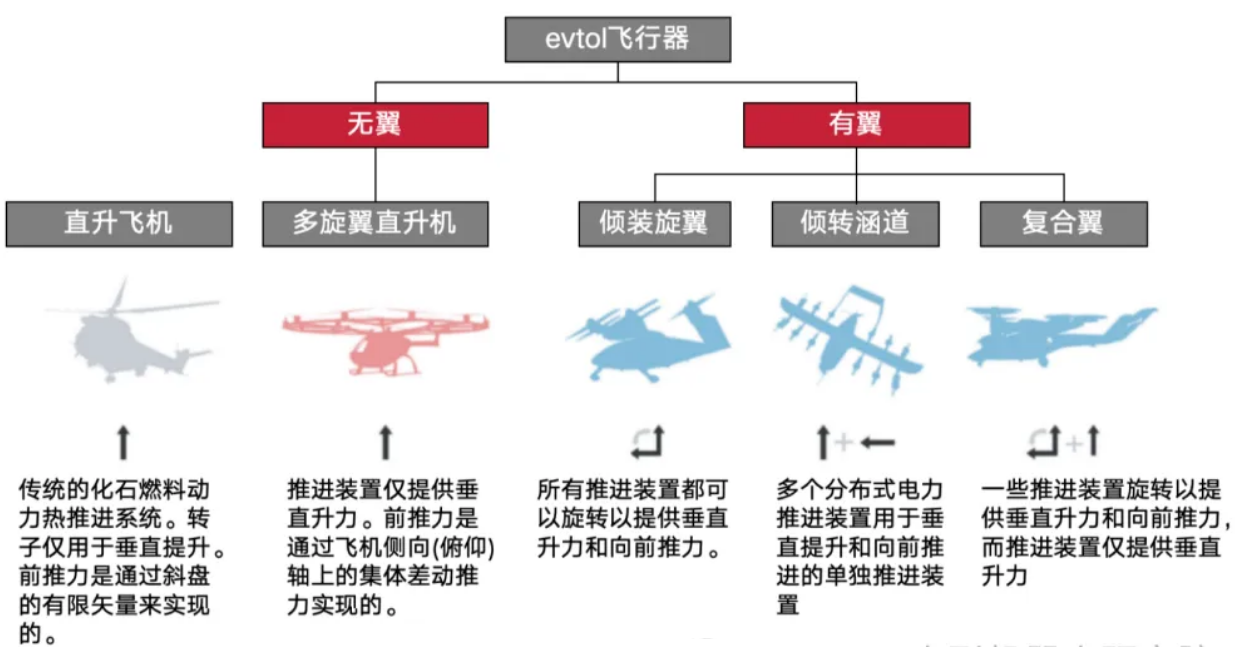
当前,全球发布的eVTOL方案已有上千种,从旋翼机翼构型上看,主流方案主要有多旋翼、复合翼、矢量推力等几种类型,其中矢量推力构型又可分为倾转旋翼、倾转机翼和倾转涵道等几种衍生构型。
多旋翼构型
多旋翼构型一般是通过变转速机制,调整进入流量来实现飞行器姿态控制,如六旋翼、八旋翼。其以紧凑的占地面积、垂直起降能力和精准悬停性能,适用于城市内短途运输、航拍、消防救援等场景。
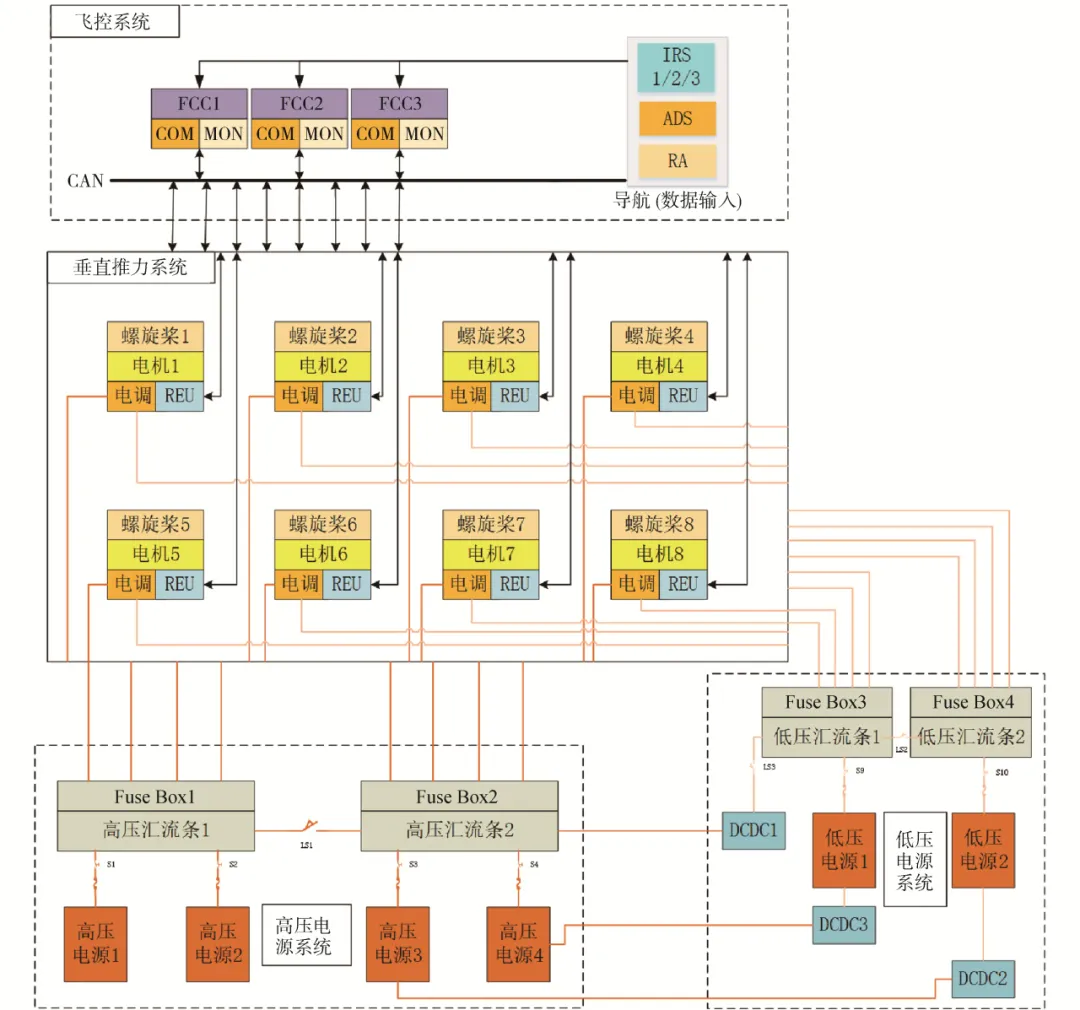
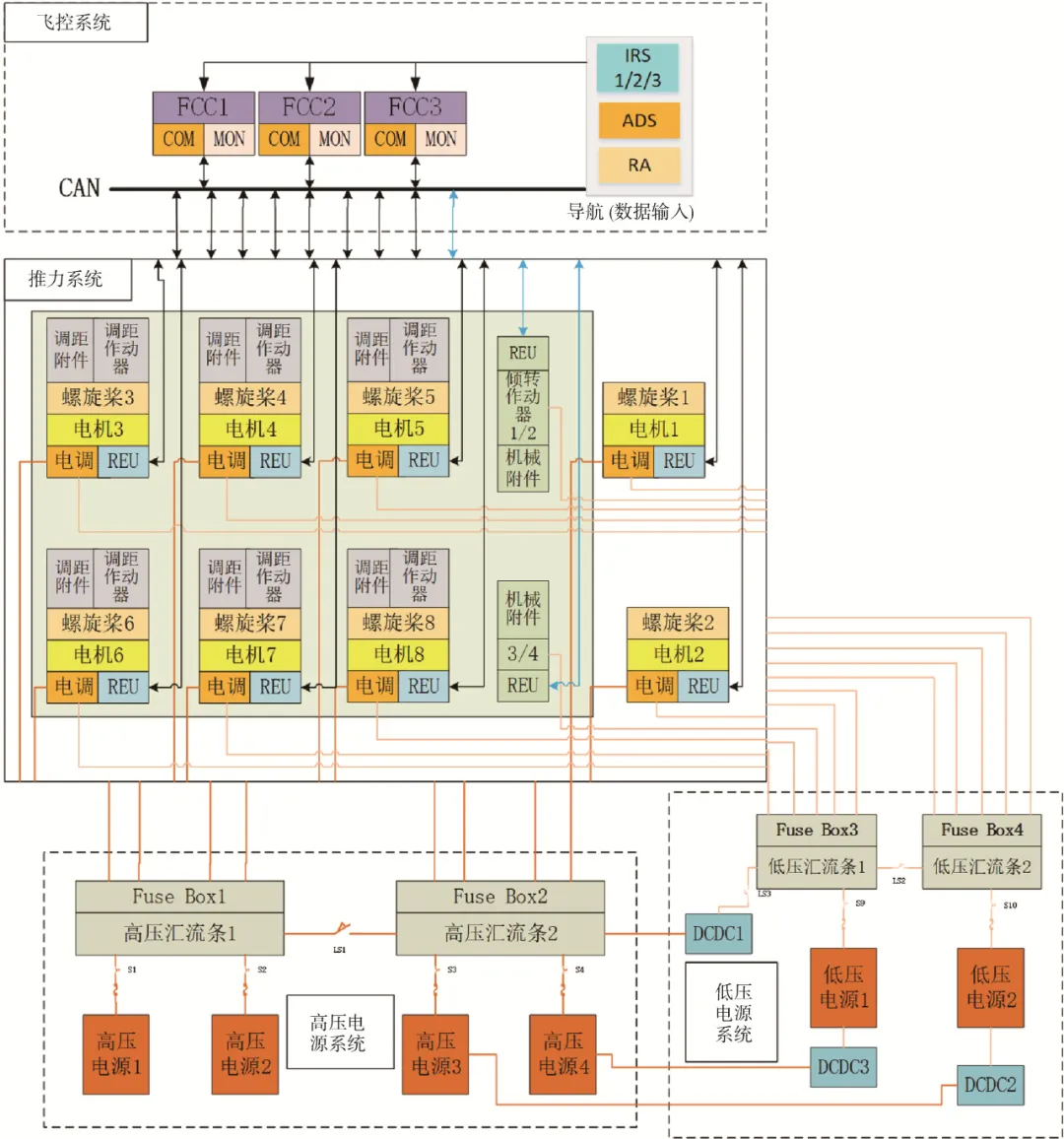
1) 垂直推力系统:主要由8套垂起电机、电调、REU、电机冷却系统和螺旋桨组成;
2) 高压电源系统:主要由4套高压电池、电池冷却系统和配套电路组成;
3) 低压电源系统:主要由2套低压电池、电池冷却系统及配套电路组成;
4) 飞行控制系统:主要由3套核心计算单元、飞管系统及配套的通讯链路组成。
多旋翼构型代表产品主要有:中国亿航智能EH216-S、小鹏汇天旅航者X2、零重力飞机工业ZG-ONE,以及美国Wisk公司的AERO-POC、德国VOLOCOPTER公司的VoloCity等。
亿航智能 EH216-S 8轴16桨




复合翼构型
复合翼构型复合翼构型集旋翼飞机与固定翼飞机的优势于一体,通过旋翼提供垂直起降所需推力,机翼则在平飞时提供升力与巡航效能,在城市间通勤、物流配送以及部分军事任务场景中展现出了显著优势。
复合翼构型最大的特点是具有巡航飞行的固定翼结构,另外还配备两类旋翼,一类实现垂起功能,通常垂直配置在机翼或机翼附近,另一类辅助巡航飞行,通常放置于机尾。




牧羽航空 AT1280H 垂起旋翼8个 水平推进翼1个
矢量推力-倾转旋翼构型
倾转旋翼构型是在机翼固定的情况下设置伺服机构,单独调整旋翼指向。在起降和悬停阶段,倾转系统将旋翼置于垂直位置,飞行器类似于多旋翼飞行;在巡航阶段,倾转系统将旋翼置于水平位置,飞行器相当于固定翼飞行;在过渡阶段,倾转系统将根据需要调节旋翼的角度。
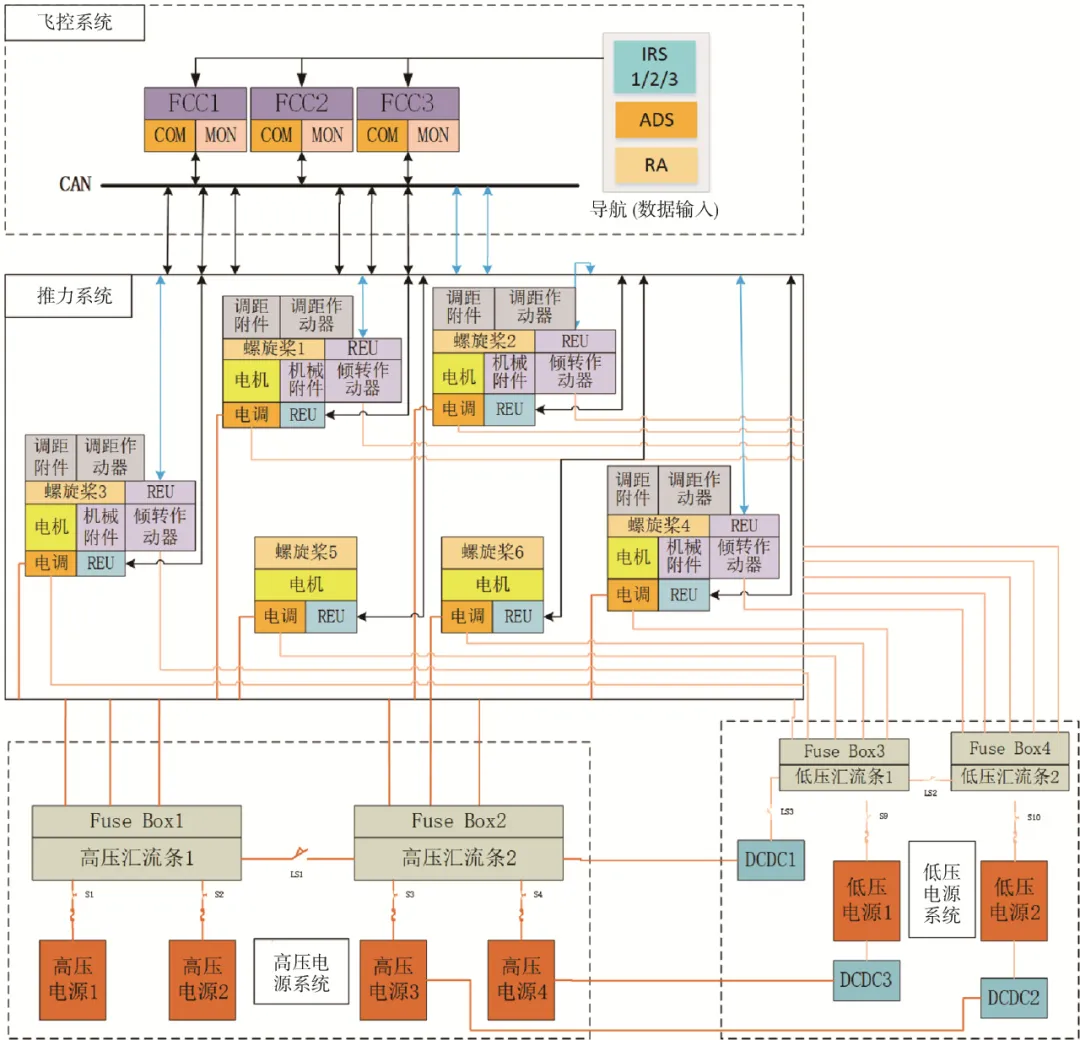
以四桨倾转旋翼+双桨垂直升力构型为例,其推力系统构成大致包括固定垂直旋翼系统和倾转旋翼系统。
垂直推力由2套固定垂直旋翼系统组成,每套固定旋翼系统均包括电机、电机冷却系统、电调、REU和螺旋桨。倾转旋翼系统由4套倾转旋翼组件组成,每套倾转旋翼组件包括电机、电机冷却系统、电调、REU、螺旋桨、倾转机构、倾转作动器、桨距调节作动器和桨距调节附件。




零重力 ZG-T6 倾转旋翼6个(全倾转旋翼)
矢量推力-倾转机翼构型
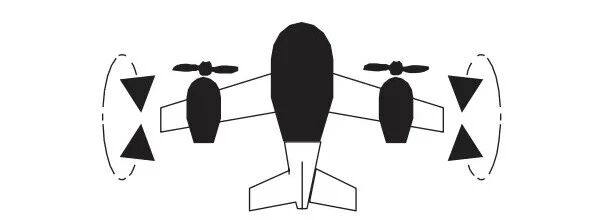
倾转机翼构型的旋翼大致沿弦长方向固连在机翼上,其与固定翼加倾转旋翼构型的eVTOL相似,前者通过倾转机翼来改变推力矢量,后者通过倾转旋翼来改变推力矢量。以六桨倾转机翼构型为例,其推力系统主要由倾转机翼系统和平衡尾桨组成。
倾转机翼系统由6套推力螺旋桨组件和左右2套倾转机构组成。推力螺旋桨组件由电机、电调、REU、螺旋桨、桨距调节作动器和桨距调节附件组成。倾转机构由REU、双倾转作动器和机械附件组成。平衡尾桨由安装在飞行器尾部的2套螺旋桨组成,尾桨提供负推力来平衡起降时候的前倾力矩。尾桨主要由电机、电机冷却系统、电调、REU和螺旋桨组成。



矢量推力-倾转涵道构型
倾转涵道构型相比倾转旋翼构型,最大变化则是在旋翼外侧安装了涵道,利用涵道风扇提供推力和方向变化,消除了开放式螺旋桨的安全隐患。当前,全球发布的eVTOL设计中采用涵道的方案不少,但是能够进入到原型机阶段、真正完成全过程试飞、通过运营考验还有很长的路要走。主要是涵道也有不少严重的缺陷,比如:结构重量大幅度增加。涵道必须要有足够的强度和刚度,尤其是刚度,否则一旦涵道向内变形损坏,即使一个涵道里面有2个电机螺旋桨,其裕度安全也将归零。悬臂梁形式的涵道相比悬臂梁形式螺旋桨的支撑结构,重量经常会增加200%-400%甚至更高,对于重量控制非常严格的飞行器来讲,代价非常大。
制造精度要求更高。转子与涵道壁之间的距离要求非常小(一般是转子半径的1%),而且要保持形状,不能因为振动和小的撞击变形导致转子卡死;另一个就是转子和定子之间若匹配不好,会产生新的噪声和振动,对于这块的设计和制造要求都远比开放式螺旋桨高一个量级。此外还有阻力增加,设计点的选取复杂等问题。




NODE AIR(研发中,倾转涵道)


来源:大连墨帆科技有限公司
