一、飞行原理
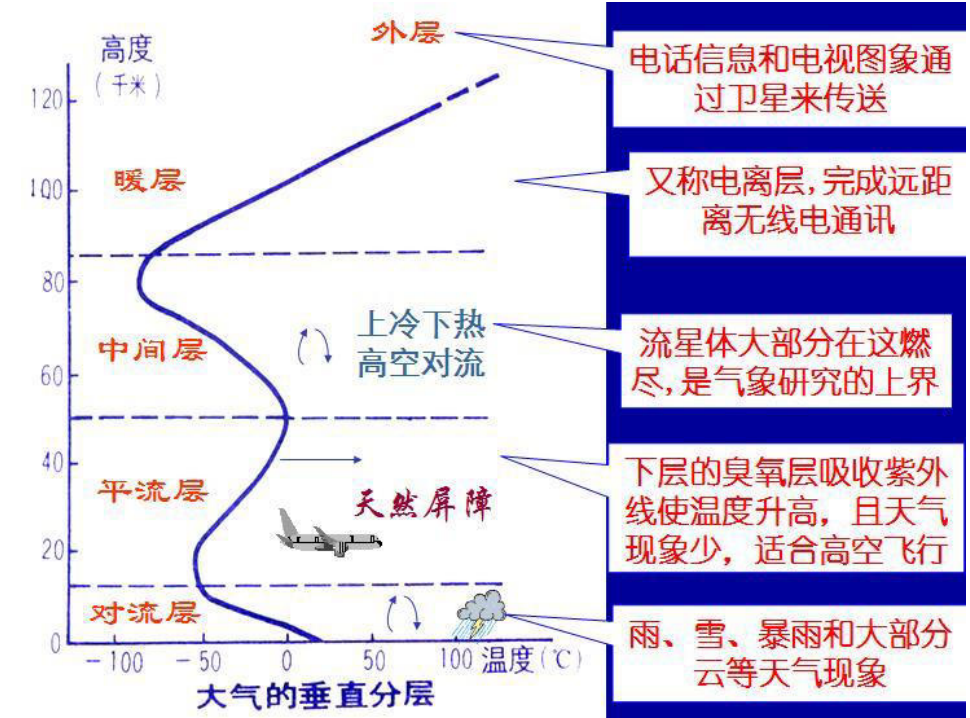
多旋翼飞行器的飞行离不开特定的大气环境,大气的绝大部分质量集中在对流层和平流层,目前多数航空器包括多旋翼都在这两层大气内活动。对流层存在雨、雪、暴雨等多种天气现象,平流层则因下层臭氧层吸收紫外线使温度升高,且天气现象少,更适合高空飞行。
其飞行的原理依据是伯努利原理,该原理由瑞士物理学家丹尼尔・伯努利于 1738 年发现,指出不可压、理想流体沿流管作定常流动时,流速与静压呈反向变化,而静压和动压之和(总压)保持不变。这一原理通过简单的吹气实验即可验证,也是多旋翼旋翼产生升力的关键理论基础。
二、旋翼的空气动力
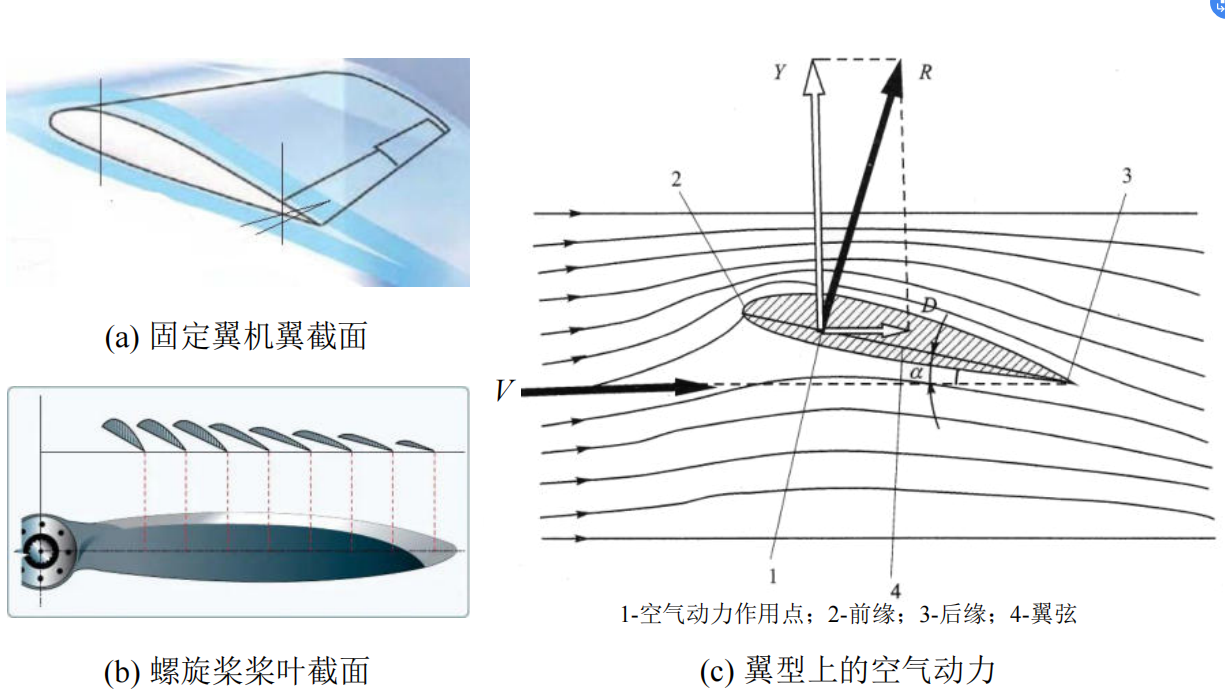
机翼“翼剖面”, 通常也叫“翼型”,是指沿平行于飞机对称平面的切平面切割机翼所得到的剖面。机翼与空气有相对运动,进而才能产生空气动力。
• 假设翼型有一个不大的迎角,当气流流到翼型的前缘时,气流分成上下两股,分别流经翼型的上下翼面。
• 由于翼型的作用,当气流流过上翼面时流动通道变窄,气流速度增大、压强降低并低于前方气流的大气压;
• 气流流过下翼面时,由于翼型前端上仰,气流受到阻拦且流动通道扩大,气流速度减小压强增大并高于前方气流的大气压。
• 因此,在上下翼面之间就形成了一个压强差,从而产生了一个向上的升力。
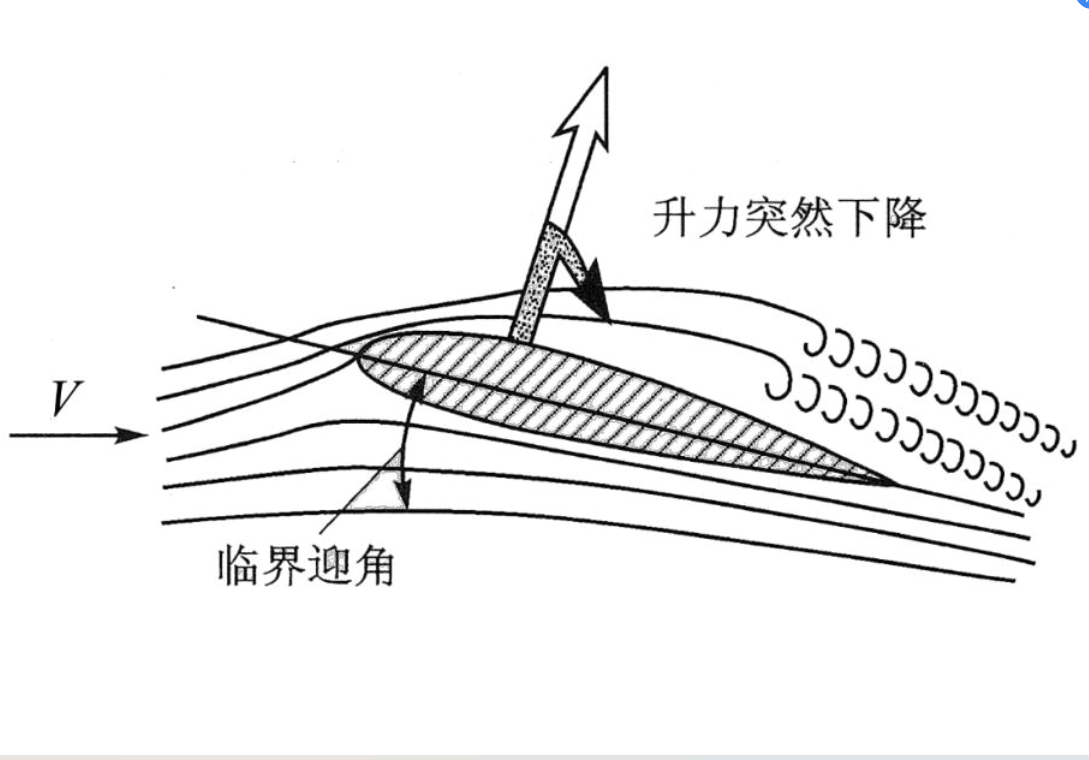
随着迎角的增大,升力也会增大,但当迎角增大到一定程度时,气流就会从机翼后缘开始分离,尾部会出现很大的涡流区,这时,升力会突然下降,而阻力却迅速增大,这种现象称为“失速”。失速刚刚出现时的迎角叫“临界迎角”。飞机不应以接近或大于临界迎角的状态飞行,否则会使飞机产生失速,甚至造成飞行事故。
三、多旋翼的操控原理与性能评估
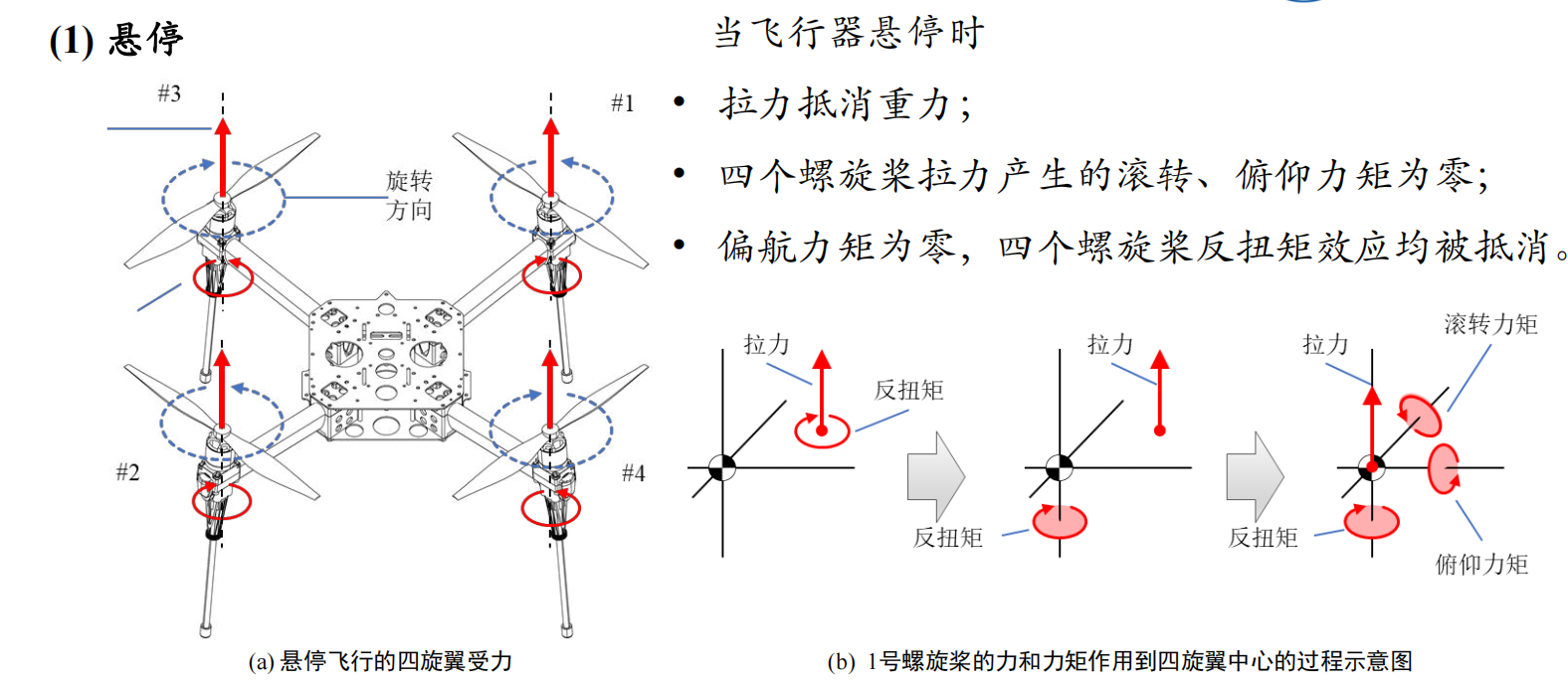
多旋翼的操控涵盖悬停、升降、前后、左右、偏航等多种运动模式。悬停时,四个螺旋桨产生的拉力需抵消重力,且滚转、俯仰、偏航力矩均为零,反扭矩效应也需完全抵消,直升机则通过尾桨或共轴双桨的方式抵消反扭矩。
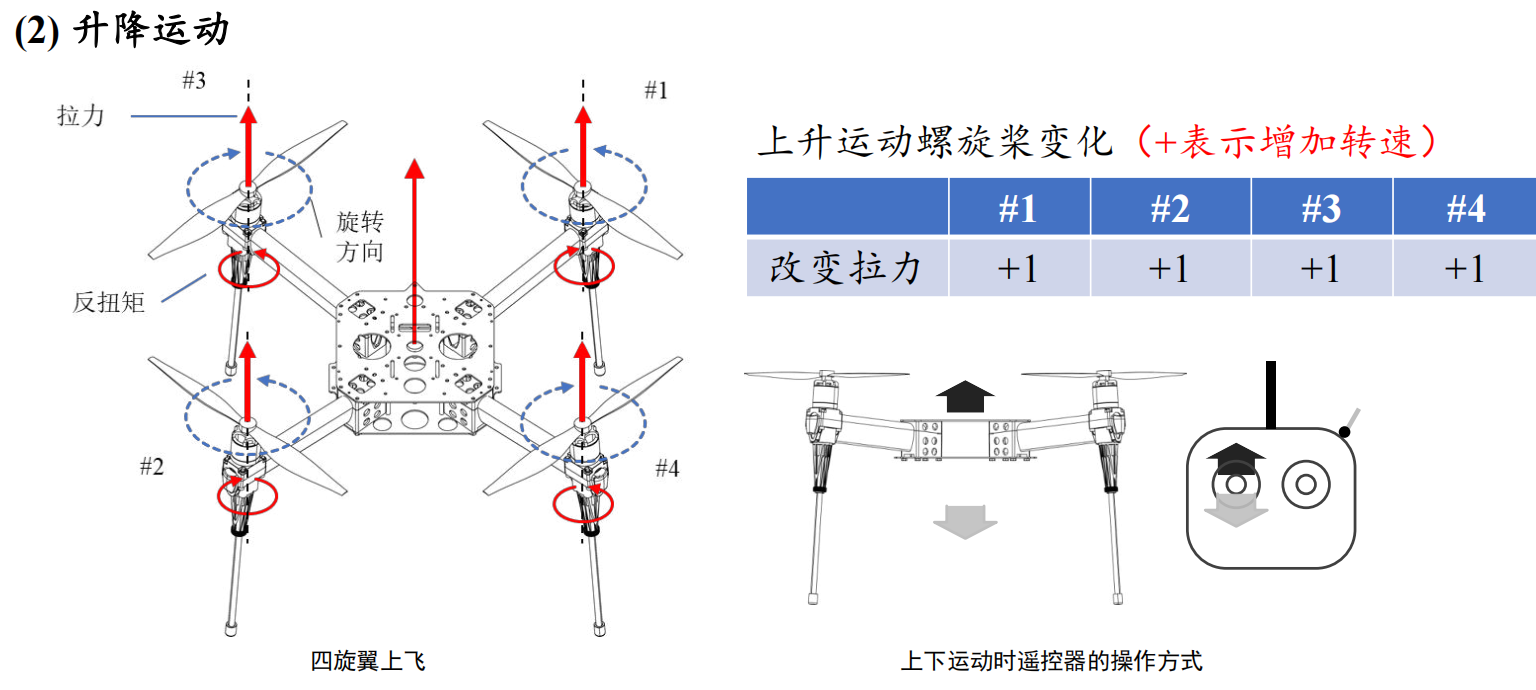
升降运动通过同步增加或减小四个螺旋桨的转速实现,上飞时所有螺旋桨转速均增加。
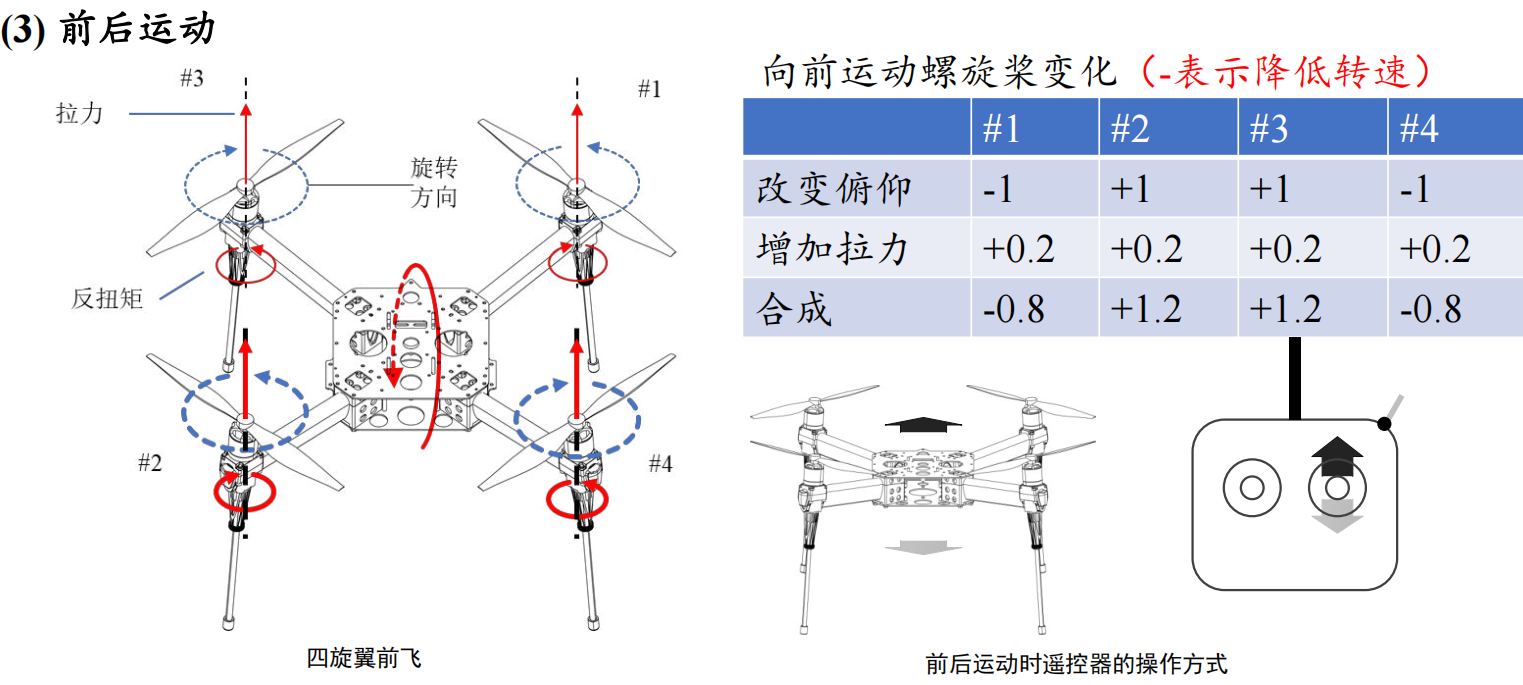
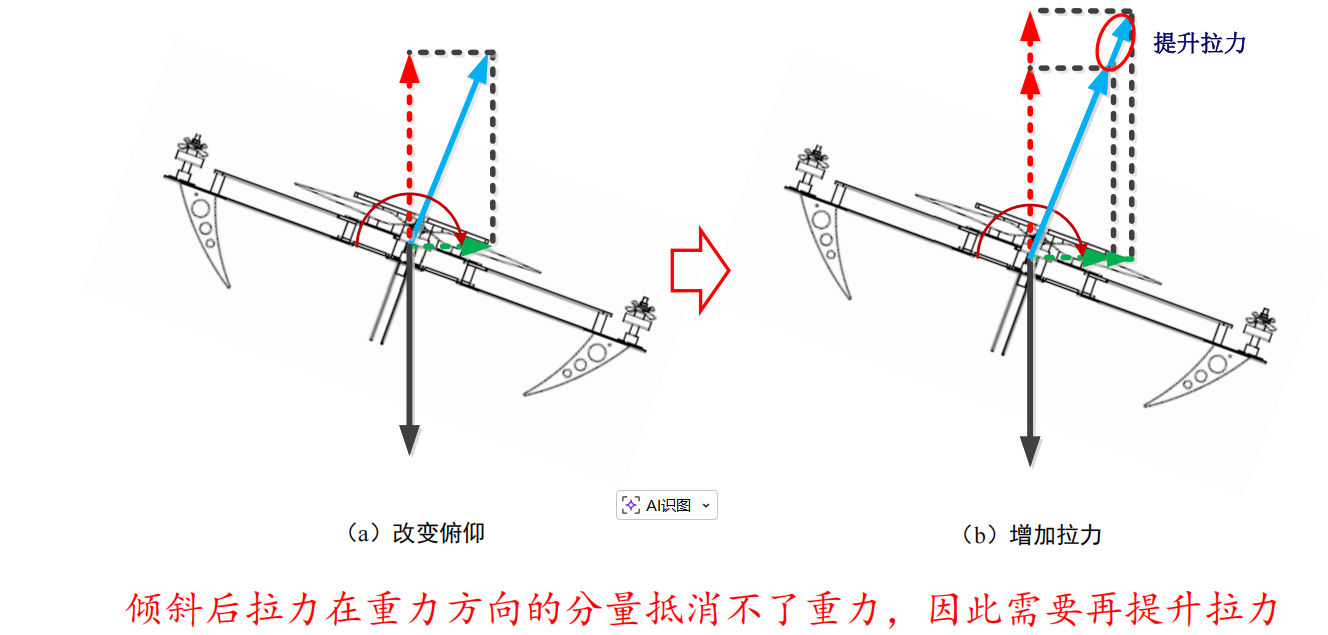
前后运动需要改变俯仰力矩,同时适当增加整体拉力,以弥补倾斜后拉力在重力方向分量的不足。
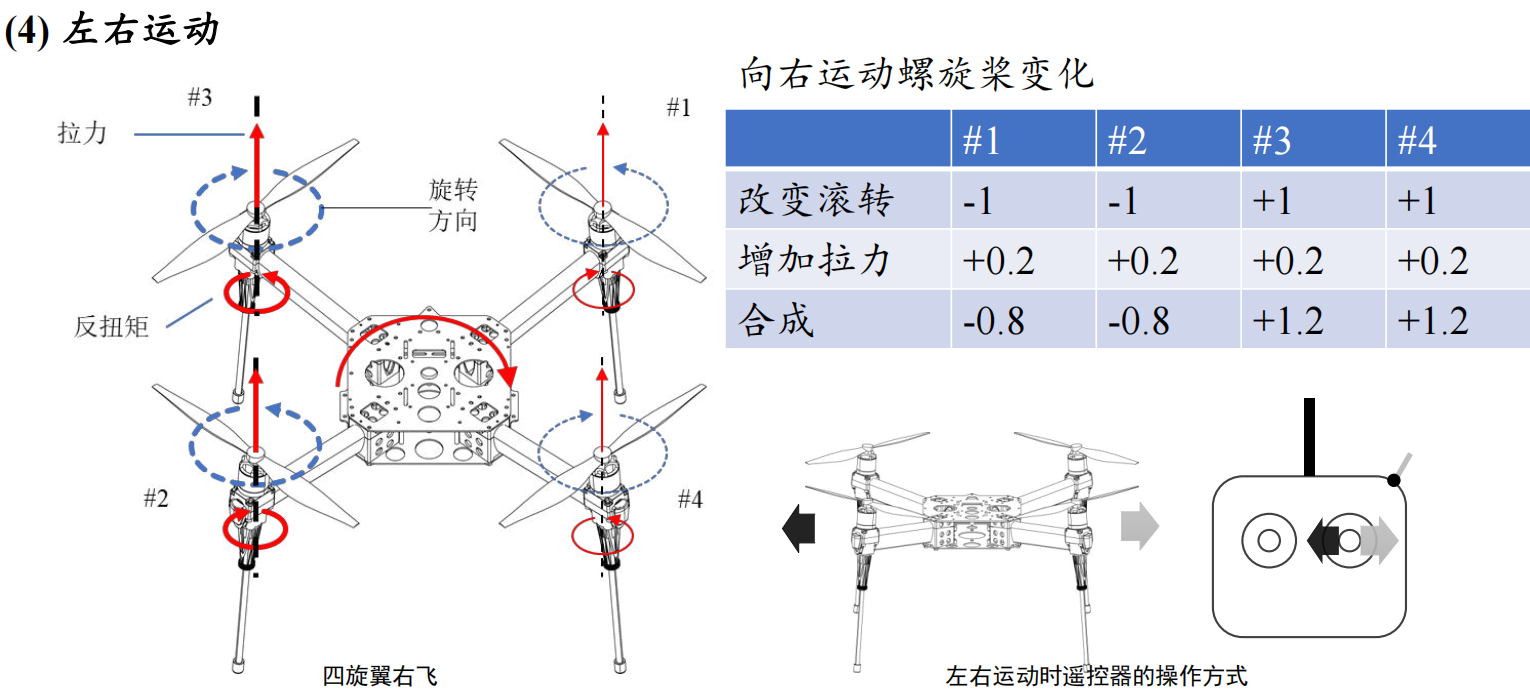
左右运动则通过改变滚转力矩,配合整体拉力的增加来实现。
偏航运动可通过调整不同螺旋桨的转速形成扭矩差,工程中还会通过增加电机安装角的方式增大偏航力矩。

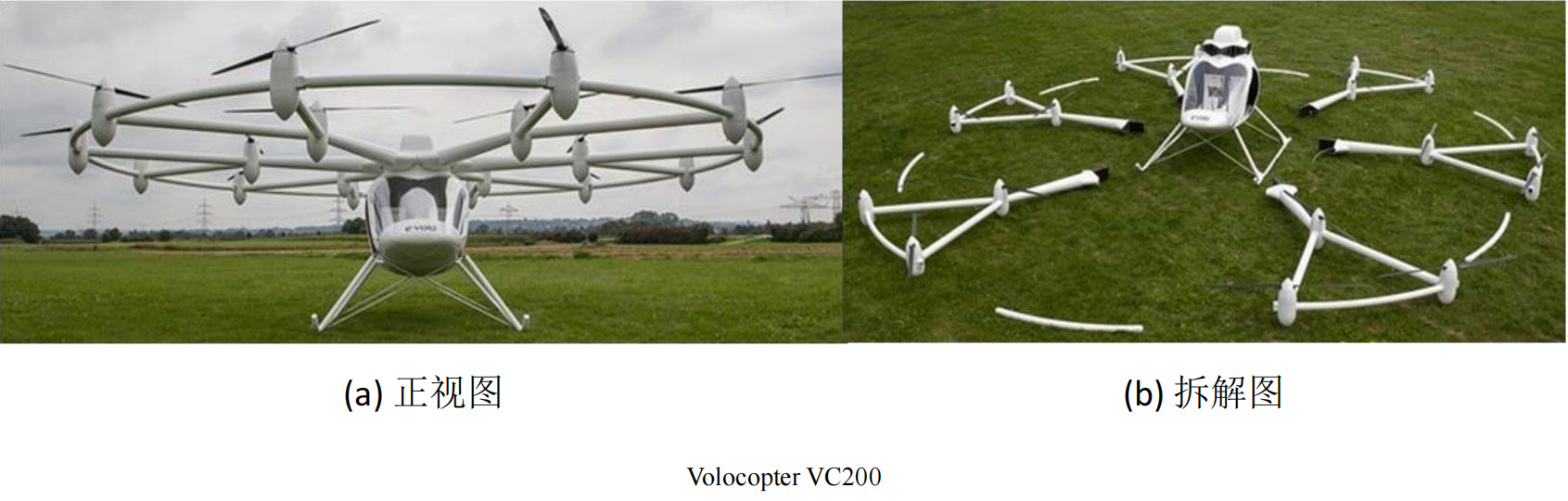
在性能方面,多旋翼具有出色的可操控性、运动相互解耦特性、高可靠性和便捷的勤务性,但也存在明显瓶颈,桨叶尺寸越大,越难迅速改变角速度,且大载重下,刚性大的桨叶因上下挥舞容易折断,这也限制了多旋翼向大尺寸方向的发展,不过 Volocopter VC200 等改进型号通过多电机冗余设计,试图在安全性和性能上找到新的平衡。